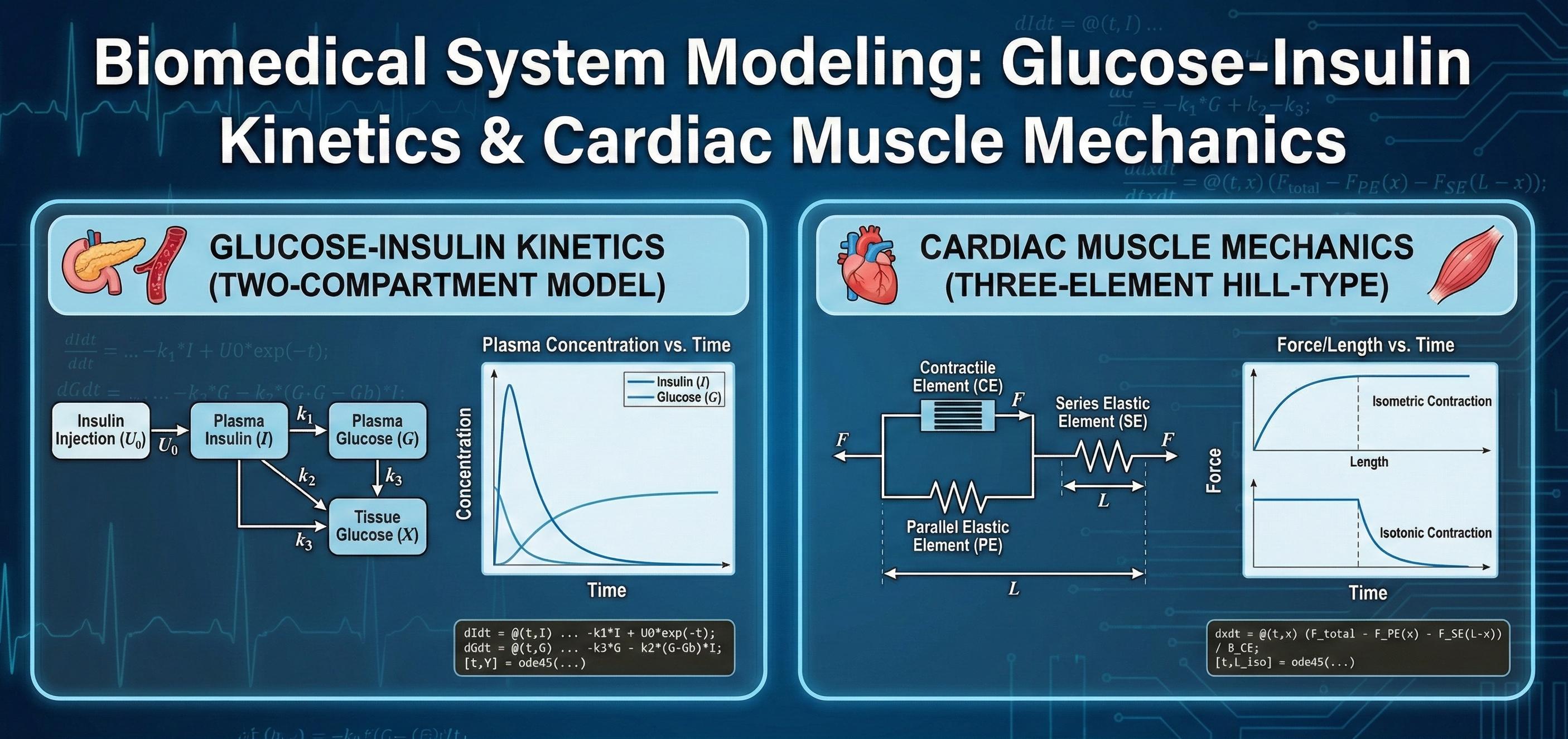
Biomedical System Modeling: Glucose-Insulin Kinetics & Cardiac Muscle Mechanics ( Biomechanics )
A comprehensive solution set for modeling physiological systems in MATLAB. This download includes a Two-Compartment Glucose-Insulin Model (Berman) to simulate plasma dynamics and a Three-Element Cardiac Muscle Model (Hill-type) to analyze isometric and isotonic contraction mechanics.
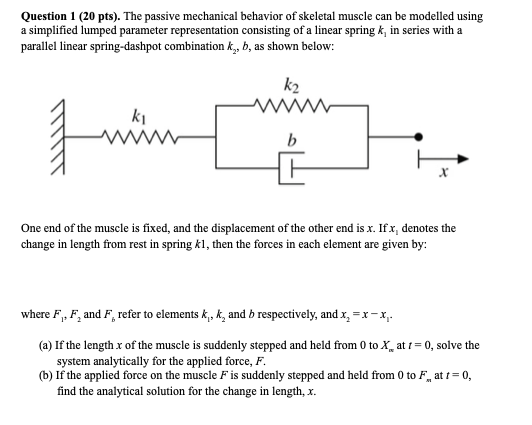
Question 1 (20 pts). The passive mechanical behavior of skeletal muscle can be modelled using a simplified lumped parameter representation consisting of a linear spring k1 in series with a parallel linear spring-dashpot combination k2, b, as shown below:
One end of the muscle is fixed, and the displacement of the other end is x. If x1 denotes the change in length from rest in spring k1, then the forces in each element are given by:
F_1 =k_1 x_1
F_2 =k_2 x_2
F_b =b (dx_2)/dt
where F1, F2 and Fb refer to elements k1, k2 and b respectively, and x2 = x − x1.
If the length x of the muscle is suddenly stepped and held from 0 to Xm at t = 0, solve the system analytically for the applied force, F.
If the applied force on the muscle F is suddenly stepped and held from 0 to Fm at t = 0, find the analytical solution for the change in length, x.
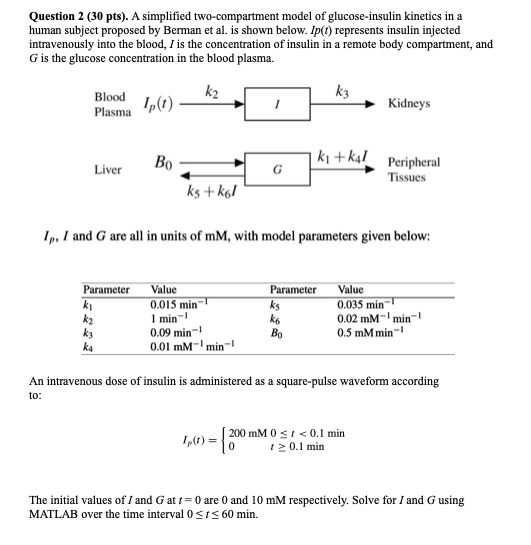
Question 2 (30 pts). A simplified two-compartment model of glucose-insulin kinetics in a human subject proposed by Berman et al. is shown below. Ip(t) represents insulin injected intravenously into the blood, I is the concentration of insulin in a remote body compartment, and G is the glucose concentration in the blood plasma.
An intravenous dose of insulin is administered as a square-pulse waveform according
to:
The initial values of I and G at t = 0 are 0 and 10 mM respectively. Solve for I and G using MATLAB over the time interval 0 ≤ t ≤ 60 min.
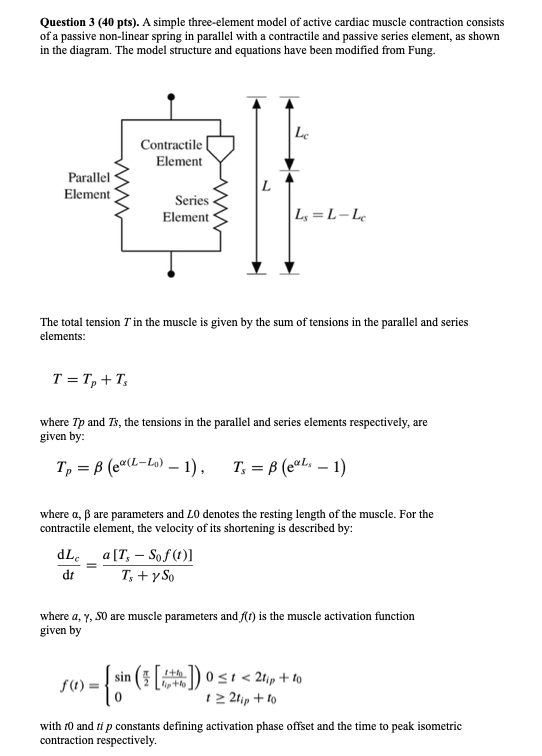
Question 3 (40 pts). A simple three-element model of active cardiac muscle contraction consists of a passive non-linear spring in parallel with a contractile and passive series element, as shown in the diagram. The model structure and equations have been modified from Fung.
The total tension T in the muscle is given by the sum of tensions in the parallel and series elements:
where Tp and Ts, the tensions in the parallel and series elements respectively, are
given by:
where α, β are parameters and L0 denotes the resting length of the muscle. For the
contractile element, the velocity of its shortening is described by:
where a, γ, S0 are muscle parameters and f(t) is the muscle activation function
given by
with t0 and ti p constants defining activation phase offset and the time to peak isometric contraction respectively.
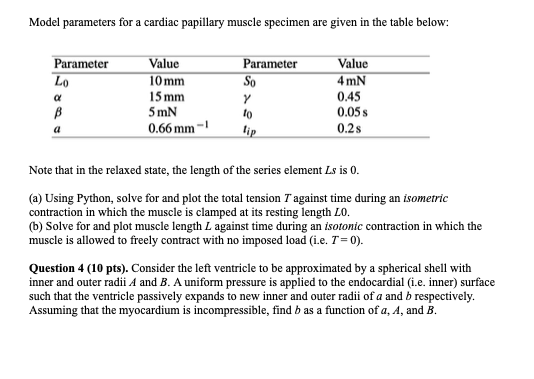
Model parameters for a cardiac papillary muscle specimen are given in the table below:
Note that in the relaxed state, the length of the series element Ls is 0.
(a) Using Python, solve for and plot the total tension T against time during an isometric contraction in which the muscle is clamped at its resting length L0.
(b) Solve for and plot muscle length L against time during an isotonic contraction in which the muscle is allowed to freely contract with no imposed load (i.e. T = 0).
Question 4 (10 pts). Consider the left ventricle to be approximated by a spherical shell with inner and outer radii A and B. A uniform pressure is applied to the endocardial (i.e. inner) surface such that the ventricle passively expands to new inner and outer radii of a and b respectively. Assuming that the myocardium is incompressible, find b as a function of a, A, and B.